Ovládání krokového motoru - složitě
Napsal: 24 zář 2018, 21:34
Větrný mlýn
Chtěl bych Vás poprosit o kritiku a připomínkování tohoto schématu:


K čemu bude toto schéma sloužit?
Po zprovoznění bych jím chtěl ovládat model větrného mlýnu na kolejišti TT.
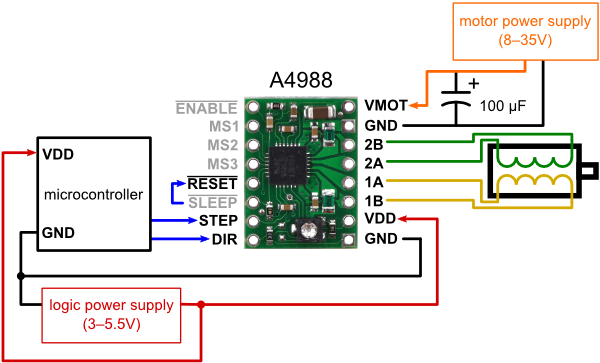
Mlýn bude mít krokový motor(svorkovnice J1, J2), který bude otáčet lopatami.
Ovládání bude probíhat stisknutím tlačítka (svorkovnice J4).
Po stisknutí tlačítka dojde k cyklu kdy mlýn udělá několik otáček s různými
rychlostmi otáček, s prodlevami a pak se zastaví.
Proč tak složitě?
Možná si říkáte proč tak složitě, když by stačil stejnosměrný motor s převodovkou
a tlačítkem. No jde o to, že mám většinu součástek doma a výsledek je jen
vedlejší produkt mých hlavních cílů.
Jaké jsou teda mé hlavní cíle?
1. nechci vyrábět miliónstou blikačku, nebo robota, nebo meteostanici, která po
výrobě skončí jako další krám v šuplíku.
2. chci si zkusit nakreslit plošný spoj a nechat si ho vyrobit. Předchozí projekt
jsem dělal na pájivým poli. Málem jsem se udrátkoval a sesypal z časového pressu.
Mám v plánu si to nechat udělat zde: https://www.plosnaky.cz/
Zanedbatelná cena ve srovnání se stresem co jsem měl.
I proto tam mám ovládání mikrokrokování, což v životě v této aplikaci nevyužiji,
ale záměrně z cvičných úkolů jsem si zkomplikoval život.
3. Chci, abych měl někde nějaké elektrozařízení které mi bude denně fungovat
po dobu pár let, abych si ověřil spolehlivost nějakého svého elektrovýtvoru.
4. chtěl jsem si zkusit odstranit problémy, které jsem měl na předchozím projektu.
Takže jaké vylepšení zde jsou oproti mému předchozímu projektu?
1. Ten nejzásadnější problém byla odolnost proti špatnému zapojení celého modulu.
Původně jsem neměl v projektu ani ochranou diodu proti přepólování. Přece se nespletu.
No dál ani psát nemusím, v 10 večer nemohu najít nějakou chybu, přepojuji co se dá, zkouším.
Pak dám černej drát na červený svorky a červený drát na černý svorky .....
Řeším to vyloženě kulometem - Graetzovo zapojení.
Proti nějaké nečekané chybě vkládám do schematu tepelnou pojistku F1. Předpokládám,
že odběr bude kolem cca 300 až 500 mA . Ovšem použiji pojistku, až podle toho co naměřím.
Krokový motor na driveru proudově utlumím co to půjde. Požadovaný kroutící moment bude minimální.
Dále jsem zde:
https://www.arduino-forum.cz/viewtopic.php?f=9&t=1352
řešil ochranu před vyšším napětím přivedeným do svorek J4 . Mám tam zenerovu diodu D3.1,
odpor R3.1 a kondenzátor C2.
Diodu jsem si vybral:
BZX 55/C 5V1
https://www.gme.cz/zenerova-dioda-bzx83v005-1
Chtěl bych, aby ten vstup byl odolný proti 48V.
V dalších projektech bych chtěl využívat i 48V, což je maximum, které umožňuje driver.
Tudíž když přivedu 48V na svorkovnici J4, tak se otevře dioda D3.1 a skrz ni a odpor R3.1
poteče proud I = U / R = 48V / 1 000 Ohm = 48 mA
Ha, a co teď ? Nějak si nejsem zda to tak může být? Nejsem z datového listu moc chytrej.
Navíc v originále měl odpor jen 22 Ohm, což by znamenalo
I = U / R = 48V / 22 Ohm = 2.18 A
2. Když mi zhořel driver, ať už z jakéhokoliv důvodu (špatně nastavený proud, špatný driver
s vnutřním zkratem, přepolólování ...), tak sebou do věčných lovišť vzal i arduino. To že jsem
zničil dvě komponenty, mi až tak nevadilo, ale děsilo mě, zda tam nějaké to šlusnutí nemohlo
ovlivnit dalších 14 arduin, které byly zapojeny k sobě přes i2c komunikaci.
Proto tam mám zenerovi diody D1.2 až D1.7 a D1.10
3. Dále mi vadilo na předchozím projektu, že po zapnutí se nejdříve spustí driver a pak až
po naběhnutí arduina se vypne:
řešeno zde:
https://www.arduino-forum.cz/viewtopic.php?f=9&t=1409
Do schématu jsem doplnil PullUp rezistor 4.1
Chtěl bych Vás poprosit o kritiku a připomínkování tohoto schématu:
K čemu bude toto schéma sloužit?
Po zprovoznění bych jím chtěl ovládat model větrného mlýnu na kolejišti TT.
Mlýn bude mít krokový motor(svorkovnice J1, J2), který bude otáčet lopatami.
Ovládání bude probíhat stisknutím tlačítka (svorkovnice J4).
Po stisknutí tlačítka dojde k cyklu kdy mlýn udělá několik otáček s různými
rychlostmi otáček, s prodlevami a pak se zastaví.
Proč tak složitě?
Možná si říkáte proč tak složitě, když by stačil stejnosměrný motor s převodovkou
a tlačítkem. No jde o to, že mám většinu součástek doma a výsledek je jen
vedlejší produkt mých hlavních cílů.
Jaké jsou teda mé hlavní cíle?
1. nechci vyrábět miliónstou blikačku, nebo robota, nebo meteostanici, která po
výrobě skončí jako další krám v šuplíku.
2. chci si zkusit nakreslit plošný spoj a nechat si ho vyrobit. Předchozí projekt
jsem dělal na pájivým poli. Málem jsem se udrátkoval a sesypal z časového pressu.
Mám v plánu si to nechat udělat zde: https://www.plosnaky.cz/
Zanedbatelná cena ve srovnání se stresem co jsem měl.
I proto tam mám ovládání mikrokrokování, což v životě v této aplikaci nevyužiji,
ale záměrně z cvičných úkolů jsem si zkomplikoval život.
3. Chci, abych měl někde nějaké elektrozařízení které mi bude denně fungovat
po dobu pár let, abych si ověřil spolehlivost nějakého svého elektrovýtvoru.
4. chtěl jsem si zkusit odstranit problémy, které jsem měl na předchozím projektu.
Takže jaké vylepšení zde jsou oproti mému předchozímu projektu?
1. Ten nejzásadnější problém byla odolnost proti špatnému zapojení celého modulu.
Původně jsem neměl v projektu ani ochranou diodu proti přepólování. Přece se nespletu.
No dál ani psát nemusím, v 10 večer nemohu najít nějakou chybu, přepojuji co se dá, zkouším.
Pak dám černej drát na červený svorky a červený drát na černý svorky .....
Řeším to vyloženě kulometem - Graetzovo zapojení.
Proti nějaké nečekané chybě vkládám do schematu tepelnou pojistku F1. Předpokládám,
že odběr bude kolem cca 300 až 500 mA . Ovšem použiji pojistku, až podle toho co naměřím.
Krokový motor na driveru proudově utlumím co to půjde. Požadovaný kroutící moment bude minimální.
Dále jsem zde:
https://www.arduino-forum.cz/viewtopic.php?f=9&t=1352
řešil ochranu před vyšším napětím přivedeným do svorek J4 . Mám tam zenerovu diodu D3.1,
odpor R3.1 a kondenzátor C2.
Diodu jsem si vybral:
BZX 55/C 5V1
https://www.gme.cz/zenerova-dioda-bzx83v005-1
Chtěl bych, aby ten vstup byl odolný proti 48V.
V dalších projektech bych chtěl využívat i 48V, což je maximum, které umožňuje driver.
Tudíž když přivedu 48V na svorkovnici J4, tak se otevře dioda D3.1 a skrz ni a odpor R3.1
poteče proud I = U / R = 48V / 1 000 Ohm = 48 mA
Ha, a co teď ? Nějak si nejsem zda to tak může být? Nejsem z datového listu moc chytrej.
Navíc v originále měl odpor jen 22 Ohm, což by znamenalo
I = U / R = 48V / 22 Ohm = 2.18 A
2. Když mi zhořel driver, ať už z jakéhokoliv důvodu (špatně nastavený proud, špatný driver
s vnutřním zkratem, přepolólování ...), tak sebou do věčných lovišť vzal i arduino. To že jsem
zničil dvě komponenty, mi až tak nevadilo, ale děsilo mě, zda tam nějaké to šlusnutí nemohlo
ovlivnit dalších 14 arduin, které byly zapojeny k sobě přes i2c komunikaci.
Proto tam mám zenerovi diody D1.2 až D1.7 a D1.10
3. Dále mi vadilo na předchozím projektu, že po zapnutí se nejdříve spustí driver a pak až
po naběhnutí arduina se vypne:
řešeno zde:
https://www.arduino-forum.cz/viewtopic.php?f=9&t=1409
Do schématu jsem doplnil PullUp rezistor 4.1